Загрязнение морей и океанов отходами представляет собой глобальную экологическую проблему. В рамках европейской инициативы SEACLEAR команда исследователей из Технического университета Мюнхена (TUM) разработала автономного подводного робота, предназначенного для обнаружения и извлечения мусора со дна. Этот аппарат использует искусственный интеллект для анализа объектов с помощью гидролокатора и камер, захватывает их манипулятором и поднимает на поверхность. Первые испытания автоматизированной системы прошли в порту Марселя, Франция.
Во многих портах мира водолазы регулярно извлекают со дна различный мусор, включая электросамокаты, велосипеды, потерянные рыболовные сети и автомобильные покрышки. Например, в Дубровнике ученые обнаружили более тысячи единиц мусора на площади всего 100 квадратных метров.
Автоматизированная очистка акваторий может стать перспективным решением проблемы. Система включает в себя беспилотный катер, дрон для воздушной разведки, небольшого робота для поиска мусора и подводного робота-манипулятора. По оценкам доктора Стефана Сосновски, руководителя кафедры управления информационными технологиями TUM, использование автономных систем целесообразно на глубинах от 16 метров и более.
Принцип работы системы заключается в следующем: служебный катер обеспечивает питание и передачу данных подводным аппаратам по кабелю, а также создает предварительную карту морского дна с помощью ультразвука. Небольшой поисковый робот быстро сканирует дно в поисках мусора.
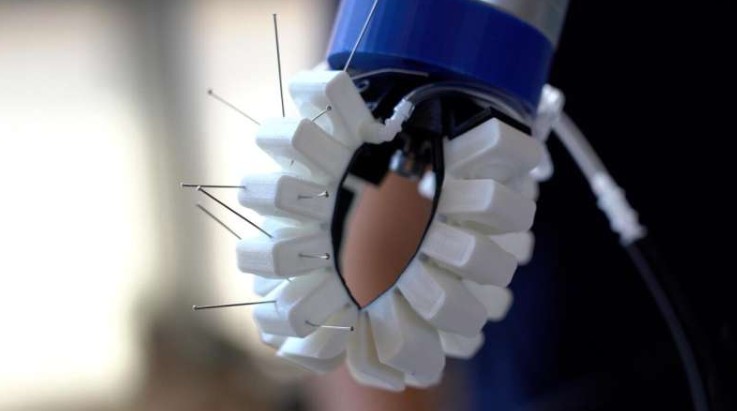
Получив данные о местоположении отходов, робот-манипулятор TUM, оснащенный восемью мини-турбинами, погружается к объектам, захватывает их и с помощью лебедки поднимает на борт автономной плавучей платформы, выполняющей роль контейнера для мусора. Ключевой особенностью робота является система 3D-распознавания мусора. «Для идентификации мусора и точного захвата объектов мы используем камеру и гидролокатор, позволяющие ориентироваться даже в мутной воде», — поясняет Сосновски. Сложность заключается в отсутствии достаточного количества изображений подводных объектов для обучения нейронных сетей.