Представьте, что вы несете скользкую тарелку. Она начинает выскальзывать. Что вы сделаете? Скорее всего, не станете сжимать ее изо всех сил, а инстинктивно скорректируете движение руки: замедлите шаг, чуть наклоните кисть или измените положение предмета. Именно эта человеческая интуиция легла в основу прорывной технологии для роботов, разработанной учеными из Университета Суррея. Их исследование, опубликованное в престижном журнале Nature Machine Intelligence, предлагает радикально новый способ предотвращения скольжения объектов в роботизированных захватах.
Традиционно роботы полагались на один главный инструмент при удержании предметов – силу сжатия. Если объект рисковал выпасть, робот просто сжимал его сильнее. Этот подход имеет серьезные ограничения: он неэффективен для очень скользких или асимметричных предметов и совершенно непригоден для хрупких вещей, которые можно раздавить, будь то хирургический инструмент, деликатная электронная деталь или спелый фрукт. Команда из Школы компьютерных наук и электронной инженерии Суррея под руководством доктора Амира Эсфахани предложила решение, вдохновленное природой.
Суть их метода в том, чтобы научить робота не просто крепче держать, а чувствовать момент, когда предмет начинает проскальзывать, и мгновенно адаптировать движение всей руки или манипулятора в режиме реального времени. Как объясняет доктор Эсфахани: «Мы научили наших роботов действовать более по-человечески, чувствуя, когда что-то может выскользнуть, и автоматически корректируя их движения, чтобы обеспечить сохранность предметов». Это означает замедление, изменение угла наклона или траектории перемещения – все то, что делает человек инстинктивно.
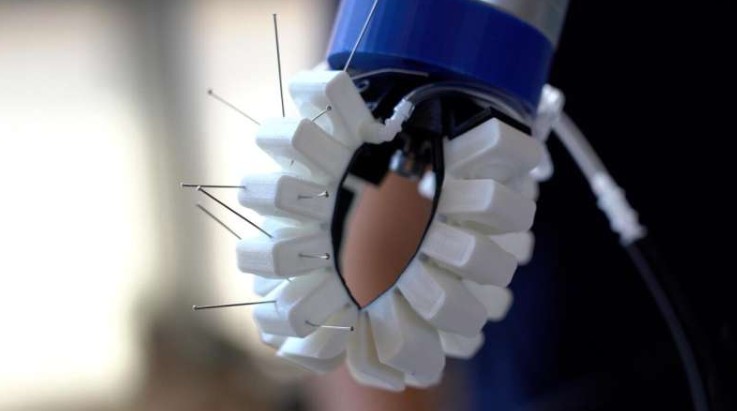
Ключевым элементом технологии стала «тактильная модель опережения» (tactile look-ahead model). Это система прогнозирующего управления, которая постоянно анализирует запланированные движения робота и текущие тактильные данные с датчиков захвата. Она позволяет роботу предвидеть риск скольжения еще до того, как предмет начнет реально смещаться. Робот не ждет сбоя, а активно его предотвращает, модулируя свою траекторию.
Важнейшее преимущество – универсальность. Исследователи доказали, что система успешно работает даже с объектами и траекториями, на которых она не обучалась специально. Это открывает двери для эффективного применения технологии в неконтролируемых, реальных условиях. Потенциал применения огромен. Доктор Эсфахани видит его в здравоохранении (роботы-ассистенты хирургов, аккуратно манипулирующие инструментами), на производстве (сборка микроэлектроники, работа с хрупкими материалами), в логистике (сортировка неудобных упаковок) и даже в сфере обслуживания и помощи по дому.
Это международное исследование, проведенное совместно с Университетом Линкольна, Университетом штата Аризона, Корейским передовым институтом науки и технологий (KAIST) и Кембриджской исследовательской лабораторией Toshiba Europe, впервые не только продемонстрировало, но и количественно оценило эффективность такой модуляции траектории для предотвращения скольжения как у людей, так и у роботов. «Мы считаем, что наш подход обладает значительным потенциалом… и открывает новые возможности для внедрения роботов в нашу повседневную жизнь», – подчеркивает Эсфахани. Эта технология – важный шаг к созданию роботов, которые взаимодействуют с физическим миром не просто сильно, а по-настоящему умно и аккуратно.