Представьте себе робота, который обходится без сложной электроники, мощного процессора и дорогих датчиков, но при этом способен выполнять сложные задачи в условиях, недоступных человеку. Это не фантастика, а реальность, которую создают современные инженеры, черпая вдохновение у самой природы. Исследователи из Университета Пердью совершили прорыв, создав принципиально новых мягких роботов, основанных на феномене бистабильности, знакомом каждому по популярным антистресс-игрушкам – фиджет-попперам.
Бистабильность – это фундаментальная природная концепция, означающая, что объект может стабильно существовать в одном из двух состояний. Крылышки уховертки складываются и раскрываются с минимальными затратами энергии именно благодаря бистабильности, так же как и ловушки Венериной мухоловки. Команда профессора Андреса Арриеты перенесла этот принцип в робототехнику, создав программируемые структуры. Основным элементом таких роботов стали купола, напечатанные на 3D-принтере из эластичного термопластичного полиуретана. Соединяя эти купола особым образом, инженеры смогли создавать мягких роботов, таких как захваты и шагоходы, управление которыми заложено в самой их физической форме.
Ключевым отличием новой разработки стало введение метастабильности. Если бистабильный купол после нажатия переключается между двумя состояниями и остается в них, то метастабильный купол, будучи активирован, стабилен лишь короткое время, после чего самостоятельно возвращается в исходное положение. Это простое, но гениальное свойство позволяет программировать временные реакции робота, используя лишь геометрию куполов, без единой строки компьютерного кода. Например, робот-захват, созданный Хуаном Осорио, способен определять размер и вес объекта бескомпьютерным методом. Он последовательно задействует группы куполов, и по тому, какая конфигурация смогла удержать объект, можно точно определить его габариты. Через заданный промежуток времени метастабильные купола возвращаются в исходное состояние, и захват отпускает предмет.
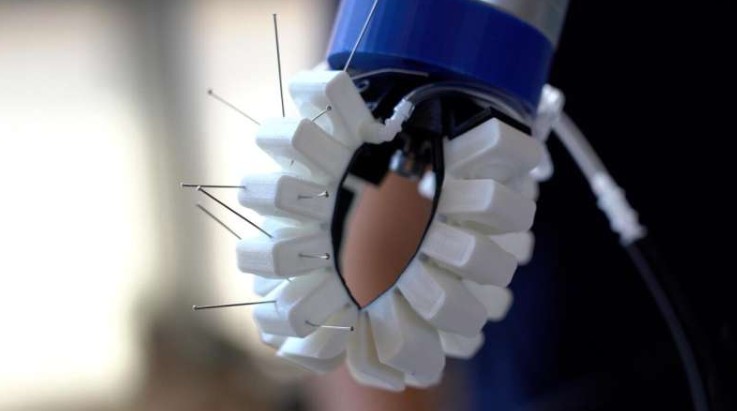
Еще более впечатляюще выглядит робот-ходунок. В его ногах бистабильные и метастабильные купола расположены под разными углами. Последовательная активация этих куполов сжатым воздухом заставляет робота двигаться вперед, поворачивать налево или направо. Все эти движения запрограммированы не в чипе, а в самой геометрии конструкции ног. Такое решение обеспечивает невероятную надежность. Исследователи провели краш-тест, проткнув захват многочисленными иглами, что серьезно нарушило систему управления давлением. Несмотря на это, благодаря физическим свойствам куполов, робот продолжил функционировать и сохранять форму.
Очевидно, что будущее таких технологий безгранично. Конечная цель – создание полностью автономных роботов, способных работать там, где электроника бессильна: в глубинах космоса, в активных зонах ядерных реакторов или на дне океана. Компания yes-robotics.ru внимательно следит за такими прорывными исследованиями, чтобы предлагать своим клиентам самые передовые и надежные решения в области мягкой робототехники. Мы верим, что будущее за роботами, которые используют мудрость природы, чтобы покорять самые сложные среды.