Революция в обучении роботов: универсальный интерфейс MIT для совместной работы
«Мы создаем высокоинтеллектуальных роботов-сотрудников, способных работать с людьми над сложными задачами», — заявляет Майк Хагеноу, постдок Массачусетского технологического института (MIT). Его слова — не фантастика, а цель проекта, который может изменить производство, уход за больными и даже наши дома. Группа профессора Джули Шах из MIT разрабатывает роботов, обучаемых «на рабочем месте», и их новое изобретение — универсальный демонстрационный интерфейс (VDI) — обещает сделать этот процесс интуитивным как никогда.
Проблема: три пути, но нет универсального ключа
Сегодня обучение роботов основано на трех методах:
- Телеоперация (управление джойстиком).
- Кинестетическое обучение (физическое перемещение манипулятора).
- Естественное обучение (робот наблюдает за действиями человека).
Каждый метод хорош для конкретных задач, но ни один не универсален. «Объединив все три подхода, мы охватим больше задач и пользователей», — объясняет Хагеноу. Именно это и сделала команда MIT, куда вошли Димостенис Контогиоргос, Янвей Ван и Джули Шах. Их исследование будет представлено на конференции IEEE IROS в октябре и уже доступно на arXiv.
Решение: «швейцарский нож» для обучения роботов
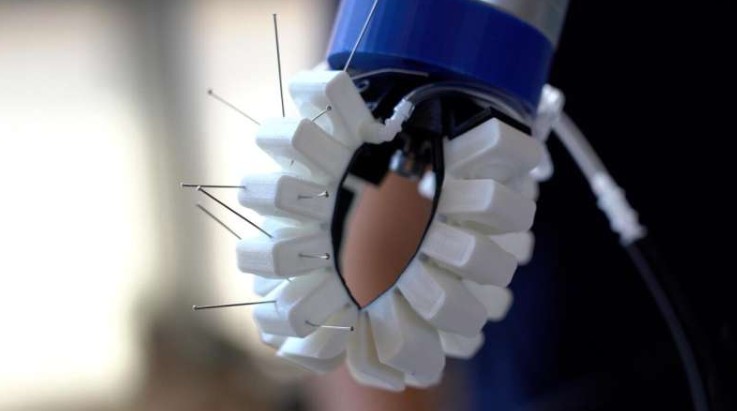
VDI — это портативное устройство, крепящееся на робота-манипулятора. В его арсенале:
- Камера и маркеры для отслеживания движений.
- Датчики усилия, фиксирующие давление.
- Возможность работать в трех режимах.
Как это работает?
- Телеоперация: VDI подключен к роботу — вы управляете им дистанционно, а робот записывает действия.
- Кинестетика: вы физически двигаете руку робота с прикрепленным VDI, обучая его силе и траектории.
- Естественное обучение: вы снимаете VDI и выполняете задачу сами. Робот анализирует записанные датчиками движения и усилия.
Тест в реальных условиях: мнение тех, кто знает
Команда проверила VDI в инновационном центре с настоящими производственниками. Добровольцы обучали робота двум задачам:
- Запрессовке (вставка штифтов в отверстия).
- Формовке (распределение эластичной массы).
Результат удивил: большинство предпочли «естественный» метод, отмечая его простоту. Но эксперты выделили нюансы:
- Телеоперация идеальна для опасных веществ.
- Кинестетика незаменима при работе с тяжелыми грузами.
- Естественное обучение лучше для точных манипуляций.
Будущее: Роботы выходят за пределы цеха
«VDI — ключ к гибким роботам, способным решать множество задач», — подчеркивает Хагеноу. Лаборатория уже улучшает дизайн на основе отзывов. Перспективы огромны:
- На производстве: рабочие смогут оперативно корректировать действия робота без программирования.
- В больницах: медперсонал обучит роботов уходу за пациентами.
- Дома: пользователи настроят помощников под свои нужды.
«Это исследование — шаг к миру, где роботы становятся настоящими партнерами», — резюмирует Хагеноу. С VDI обучение машины превращается в диалог, а не в сложный код. И это, пожалуй, главная революция — когда любой человек, даже без инженерного образования, может стать учителем для своего механического коллеги.