До недавнего времени, магнитные роботы имели фиксированный профиль намагниченности, что ограничивало возможности их программирования формы внешними магнитными полями. Ученые из Института интеллектуальных систем Макса Планка (MPI-IS) разработали новый метод перепрограммирования намагничивания, значительно расширяющий возможности программирования формы.
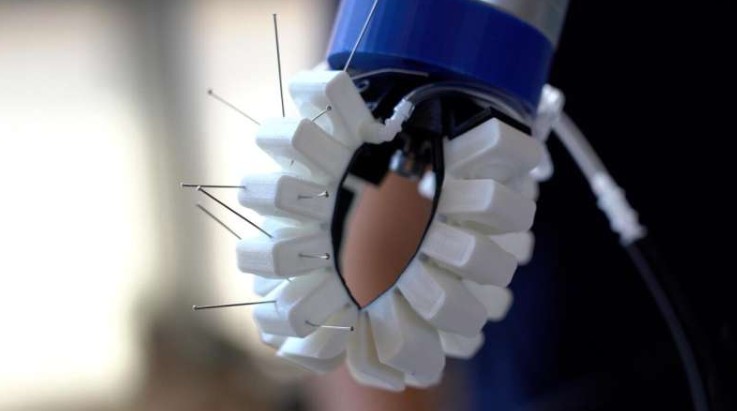
Они создали мягкого робота с профилем намагниченности, изменяемым в реальном времени. Результаты исследования опубликованы в журнале Nature. Команда под руководством профессора Метина Ситти из MPI-IS в сотрудничестве с Университетом Коч, разработала структуру из нескольких вложенных друг в друга трубок.
Каждая трубка содержит магнитные блоки с предварительно программируемым профилем намагниченности. Изменение конфигурации трубок, например, раздвигание или сближение, изменяет расположение магнитных блоков и, следовательно, профиль намагниченности всей конструкции.
В отличие от предыдущих магнитных роботов, новая технология позволяет изменять форму в реальном времени. Трубка может переходить из прямой в спиральную форму или деформироваться в противоположном направлении при постоянном магнитном поле. Метод применим к двух- и трехмерным каркасам, позволяя переключаться между режимами деформации в реальном времени без изменения магнитного поля.
Ученые изучают применение метода в различных сценариях, таких как навигация вокруг объектов без контакта, перепрограммирование ресничных массивов и координация нескольких устройств в одном магнитном поле. В медицине, технология может быть использована для малоинвазивного лечения сосудистых заболеваний, уменьшая трение и повреждение стенок сосудов при проведении катетера, что особенно важно для пожилых пациентов.